第三届湖北省大学生智能机器人创意竞赛暨第七届中国高校智能机器人创意大赛湖北省区域赛我校获奖总数再创历史新高。本届大赛以“更好、更快、更强”为主题,设主题赛和专项赛,主题赛分为创意设计类、创意竞技类、智能机器人对抗赛,专项赛分为俄罗斯方块机器人、四足智能机器人对抗赛和VEX U智能机器人对抗赛。来自我校机械学院、船海学院、计算机学院、光电学院、网安学院、人工智能与自动化学院等院系的82支队伍、近500名学生于今年6月6日和6月13日参加了校赛。经过校赛选拔,共有54支队伍、200多名学生参加了省赛。

7月13日至14日,第三届湖北省高校智能机器人创意竞赛暨第七届中国高校智能机器人创意大赛湖北省区域赛在武汉工程大学流芳校区举行。我校学子在本届大赛中共获得省级一等奖27项,省级二等奖20项,省级三等奖3项。27支省级一等奖队伍全部晋级国赛,是去年晋级国赛队伍数量的1.5倍,创下历史新高。
7月20日-21日,第七届中国高校智能机器人创意大赛VEX U专项赛初赛在华中科技大学举行。我校的四支VEX队伍参加角逐,其中HUST3队获得优秀设计奖,获得晋级国赛资格。

主题一无实物组作品“智能盆栽机器人”荣获省级一等奖。这款新型智能盆栽机器人是现代科技与自然结合的杰出代表,专为家庭植物爱好者所设计。该机器人采用独特的蜘蛛形六足机械爪作为底座,确保了其在各种地形上的稳定性和灵活性。通过这一设计,智能盆栽不仅能在室内移动,还能根据需要调整位置,以确保植物获得最佳的阳光照射和通风效果。玻璃罩花盆是这款智能盆栽的一大亮点,它不仅美观,还能为植物提供一个良好的生长环境。花盆顶部配备了一个高分辨率屏幕,用户可以通过屏幕实时查看植物的生长状态、环境数据等。此外,花盆还搭载了LED灯光系统,能够模拟自然光照,促进植物的光合作用和健康生长。
智能盆栽还配备了先进的语音功能,用户可以通过语音指令与盆栽互动。例如,可以询问植物的状态、调整光照和喷水频率等。内置的自动喷水装置和储水装置,能够根据植物的需水量自动调节喷水频率和水量,确保植物始终保持在最佳的生长状态。总的来说,这款新型智能盆栽机器人不仅为现代家庭带来了便利和乐趣,还通过先进的科技手段提升了植物的生长质量和健康水平。无论是家居、办公室还是公共场所,这款智能盆栽都是一款极具价值的创新产品,完美融合科技与自然的美妙。
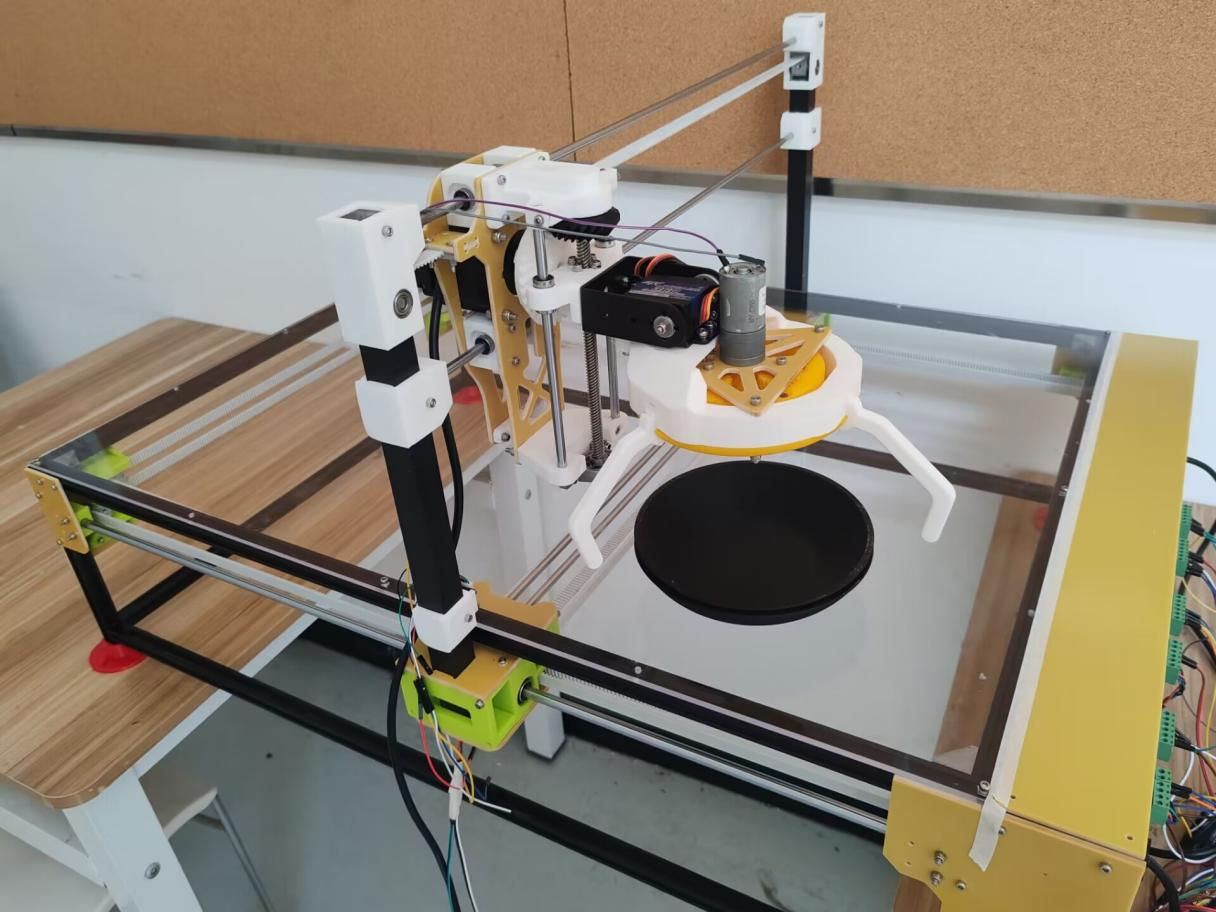
主题一实物组作品“柯灵-智能餐桌”荣获省级一等奖。在快节奏的现代生活中,智能家居体验已成为人们追求的目标。而餐后厨余区域是家务重灾区,餐后清洁成为生活体验的主要障碍之一,亟待一款产品代替人工,减轻家务负担。为了满足这一需求,我们隆重推出珂灵——一款全自动智能餐桌。该产品具有五自由度运动能力,采用corexy高精度传动机构,加智能识别算法完成全自动控制,不仅提升了餐厅和家庭的用餐体验,还带来了诸多便利和创新功能。智能餐桌的工作原理主要基于步进电机和传感设备,通过电机传动,牵引同步带牵引XY轴移动,Z轴上丝杆及锥齿轮控制爪盘升降,蜗轮蜗杆及行星齿轮组控制抓爪开合完成抓取动作。激光测距传感器扫描餐具点位后,由算法自动规划路径控制电机旋转,传动机械爪到达餐具位置完成抓取。智能餐桌采用微电子技术,安全可靠性高,同时具有低噪音、低能耗的特点,符合现代人对科技生活的追求,提升了用餐效率和体验,是现代科技与传统餐桌的完美结合。

主题三轮式格斗开放部件组作品“HelloWorld”荣获省级一等奖。HelloWorld号轮式机器人在整体机械结构方面突破了标准件的束缚,整体结构采用自主设计并加工的环氧板材和3D打印件来组成主体框架。HelloWorld号由环氧板块构成主体层式结构,板间通过3D打印件和螺钉连接,尾部设置倾斜挡板完成上台动作,四周设置光电传感器,感知自身位姿,底部配备颜色传感器,检测台上下状态,车身四周布有光电传感器,用于判断敌方外置。所有传感器均与控制装置连接,在系统性配合下极大程度地消除了视野盲区,使得机器人能够更精准地判断敌己状态,做出合理的运动决策。此外,本轮式机器人设计遵从整体性原则,将电路集成于车身内部,能够极大缓冲对抗带来的外力冲击,减小短路、断路风险。HelloWorld号在控制方面使用以stm32f103zet6为芯片的主控板,保证足够的接口接收传感信号,以及足够的运算性能实现实时控制。在硬件结构、传感策略、控制程序三方面的综合创新下,“HelloWorld号”在比赛中表现不凡,取得了优异成绩。

主题三统一部件组无人机对抗A作品“Skyrider”荣获省级一等奖。本作品聚焦于自主无人机竞赛,设计了一套综合避障、穿门及视觉识别降落的智能飞行方案。竞赛遵循严格的时间线,无人机在3分钟内完成一系列高难度任务,包括自主升空至指定高度悬停,后借助人工势场法的智慧导航,实现对环境的精准感知与自主规划。此方法巧妙运用目标点的吸引力与障碍物的斥力,形成动态的虚拟势场,确保无人机在未知环境中既能稳健前行,又能灵巧避障。在穿环环节,我们创造性地将避障算法与巡航逻辑相结合,无人机在识别到特定圆环后,能够精确调整姿态,顺利穿行,这一连贯动作不仅展现了无人机的灵活性,更为总分添彩。视觉识别降落部分,依托YOLOv2的强大目标检测能力,对降落区域的目标图片实施精准定位,进而引导无人机安全着陆。为增强系统的鲁棒性,特别加入巡航机制作为补充,即使在复杂光照或遮挡条件下,也能确保无人机准确识别目标,顺利完成降落。
主题三作品“视觉对抗A机器人”获得省级一等奖。该作品基于博创尚和"智元素"小型服务机器人,即视觉对抗的统一部件制作。这一款机器人拥有模块化设计,下半部分为3轮全向底盘,坚固的不锈钢材质;上半部分为双4自由度机械臂,手臂可单独使用;全向底盘最大速度2m/s,具有航向和角速度双闭环;在控制方面兼容树莓派(视觉处理)、 Arduino(行为处理)以及STM32(底层运动);同时拥有多款执行部件、传感器以及操作软件。
本作品本次比赛任务是攻击圆靶,机器人通过视觉识别道路自行走到靶区,完成打击靶子的动作,通过不同难度的任务,逐步提高机器视觉及运动控制在机器人中的应用水平。机器人在围挡内的白色道路区行驶,不驶出道路之外。机器人仅通过视觉传感器获取场地信息。机器人打击停止区内的靶标。靶标是横在停止区上方的一块底板及圆靶,机器人手持武器(武器上固定一支记号笔,攻击靶标,在圆靶上留下记号。



 学院微信公众号
学院微信公众号